Gazebo Export Package restucturing
This commit is contained in:
parent
2111b33c75
commit
e2da384085
5 changed files with 186 additions and 91 deletions
47
README.md
47
README.md
|
|
@ -1,5 +1,8 @@
|
|||
|
||||
# Arbench
|
||||
|
||||
---___!!! USE WITH CAUTION! Plugin on heavy developement !!!___---
|
||||
|
||||
Annotation for robotics bench. A FreeCAD workbench for annotating frames of interest, exporting these w.r.t. the part frame, and exporting part information.
|
||||
|
||||
# Installation instructions
|
||||
|
|
@ -19,6 +22,8 @@ This workbench supports versions of FreeCAD>0.16.
|
|||
|
||||
# Usage
|
||||
|
||||
## Export meta-data for part's feature frames
|
||||
|
||||
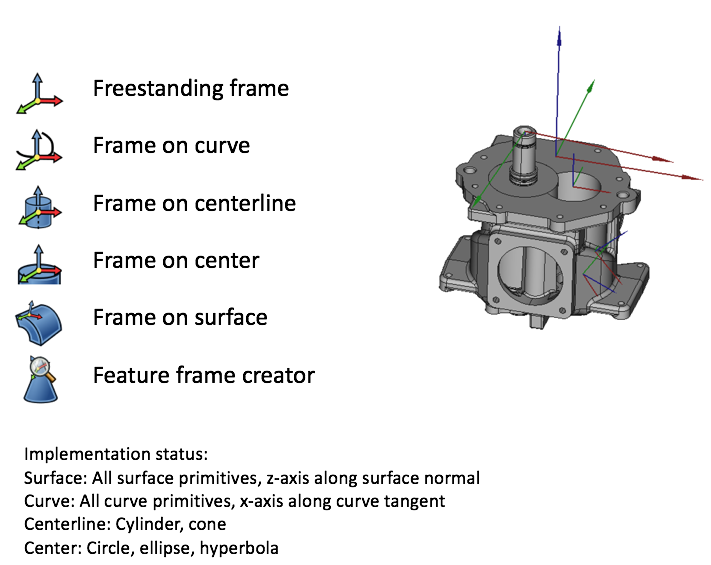
1. Click a small feature e.g. a circle
|
||||
2. Press the feature frame creator (cone with a magnifying glass on it icon)
|
||||
3. Chose type of feature to create
|
||||
|
|
@ -29,41 +34,15 @@ This workbench supports versions of FreeCAD>0.16.
|
|||
8. Use the json with whatever you want. E.g. [`arbench_part_publisher`](https://github.com/mahaarbo/arbench_part_publisher)
|
||||
|
||||
|
||||
# Freecad to Gazebo exporter
|
||||
## Generate part's model packages for Gazebo simulator
|
||||
|
||||
To generate SDF and URDF model from freecad assembly use python call:
|
||||
|
||||
```python
|
||||
freecad_exporter.export_gazebo_model(freecad_assembly_file, model_destination_folder, config)
|
||||
To generate SDF model packages from FreeCAD Document just press "Gazebo Export" button in ARBench UI. It will create folder for every `Solid` part in Document (`Compound` parts currently doesn't supported) with such structure
|
||||
```
|
||||
Note: Only links and joints are generated in the SDF model. To use the model with ros, use the URDF model.
|
||||
name_of_part
|
||||
├── model.sdf
|
||||
├── meshes
|
||||
│ └── part.dae
|
||||
└── model.config
|
||||
|
||||
## Config specification
|
||||
```json
|
||||
{
|
||||
"name": "robot_name",
|
||||
"joints_limits": {"upper": 90, "lower": -90, "effort": 10, "velocity": 5},
|
||||
"transmission": {
|
||||
"type": "transmission_interface/SimpleTransmission",
|
||||
"hardware_interface": "hardware_interface/PositionJointInterface"
|
||||
},
|
||||
"joints_config": {
|
||||
"type": "position_controllers/JointGroupPositionController",
|
||||
"grouped": true
|
||||
},
|
||||
"joints_pid": {"p": 20.0, "i": 10.0, "d": 0.0, "i_clamp": 0.0},
|
||||
"root_link": "base_link",
|
||||
"ros_package": "humanoid_17dof_description",
|
||||
"sdf_only": false,
|
||||
"export": true
|
||||
}
|
||||
```
|
||||
|
||||
**sdf_only**: Export only SDF.
|
||||
|
||||
**export**: Export mesh files.
|
||||
|
||||
## Future plans
|
||||
* Extend collada exporter to export materials from assemblies.
|
||||
* Create a FreeCAD workbench to interactively assign joints and export to gazebo.
|
||||
* Support any valid structures of assemblies.
|
||||
This packages will placed by default in your FreeCAD Document's folder and could be moved to gazebo model's folder for using them in sumulator.
|
||||
Loading…
Add table
Add a link
Reference in a new issue