Merge branch 'dosc-programming' into 'master'
o2ac paper and dds and moveit pages See merge request robosphere/robossembler-docs!6
This commit is contained in:
commit
a4ca41d8f3
8 changed files with 542 additions and 1 deletions
6
.vs/VSWorkspaceState.json
Normal file
6
.vs/VSWorkspaceState.json
Normal file
|
|
@ -0,0 +1,6 @@
|
|||
{
|
||||
"ExpandedNodes": [
|
||||
""
|
||||
],
|
||||
"PreviewInSolutionExplorer": false
|
||||
}
|
||||
BIN
.vs/robossembler-docs/v16/.suo
Normal file
BIN
.vs/robossembler-docs/v16/.suo
Normal file
Binary file not shown.
BIN
.vs/slnx.sqlite
Normal file
BIN
.vs/slnx.sqlite
Normal file
Binary file not shown.
100
docs/technologies/dds_and_ros2.md
Normal file
100
docs/technologies/dds_and_ros2.md
Normal file
|
|
@ -0,0 +1,100 @@
|
|||
---
|
||||
id: dds_and_ros2
|
||||
title: 'ROS2 и DDS: совместимость движет роботами нового поколения'
|
||||
---
|
||||
|
||||
[Оригинал статьи](https://www.rti.com/blog/ros-2-and-dds-interoperability-drives-next-generation-robotics)
|
||||
|
||||
ROS2 уже получила широкое распространение в проектах разработки автомобилей и робототехники. Поскольку сегодняшние новаторы начинают создавать инновации завтрашнего дня, следующим логическим поворотным моментом является развертывание производственного уровня. Но коммерческой робототехнике следующего поколения потребуется нечто большее, чем текущий код ROS чтобы соответствовать необходимым требованиям к производительности, совместимости, безопасности и масштабируемости. И здесь в игру вступает DDS.
|
||||
|
||||
Хорошие новости? Во многих отношениях ROS2 уже является приложением Data Distribution Service ™ (DDS). Это означает, что компоненты ROS2 могут свободно смешиваться с собственными компонентами DDS с полной совместимостью. И эта совместимость имеет решающее значение, поскольку правильный подход к проектированию гибридной системы может обеспечить возможности, выходящие далеко за рамки того, что могут предложить только ROS или ROS2.
|
||||
|
||||
Хотя DDS является общепризнанным стандартом, важно отметить, что не все предложения DDS созданы одинаково. Теоретически создание приложений на платформе ROS2 может стать отличным введением в то, как среда DDS позволяет создавать высоконадежные распределенные системы. Но на самом деле многим критически важным приложениям требуется больше от DDS, например высокая производительность, больше вариантов QoS или более простая совместимость с компонентами, не относящимися к ROS. Когда производство-класс робототехника является целью приложению ROS2 необходимо полный спектр возможностей , предлагаемых более надежной основой программного обеспечения , такие как RTI Connext ® DDS, особенно если цель состоит в том, чтобы ввести конкурентные, реальные рынки. По сути, Connext DDS расширяет набор инструментов дизайнера.
|
||||
|
||||
С технической стороны, как я буду исследовать в этом блоге, достижение этой совместимости и позиционирование ваших усилий по разработке в будущем может быть удивительно простым, потому что ROS2 была построена на DDS и использует стандартную модель данных. С точки зрения DDS, все приложения ROS2 на самом деле являются приложениями DDS. Таким образом, использование одних и тех же типов данных, названий тем и настроек QoS может быть простым делом, чтобы сделать приложение, отличное от ROS2 (например, построенное на Connext DDS), полностью совместимым с существующими приложениями ROS2. В этом сценарии вы также можете, надеюсь, пропустить эти дорогостоящие моменты «вернуться к чертежной доске» и сосредоточиться на своих дизайнерских целях.
|
||||
|
||||
## Модель данных ROS2
|
||||
|
||||
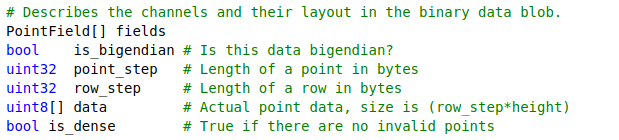
Несмотря на изменения и улучшения с каждым выпуском ROS и ROS2, основные элементы модели данных ROS остались очень согласованными. К ним относятся определения типов данных для различных датчиков, геометрических форм, траекторий, навигации, визуализации и т.д., определенных как объекты данных и как темы запросов / ответов для удаленных вызовов процедур.
|
||||
|
||||
Эти типы данных определены в формате файла, специфичном для ROS, например:
|
||||
|
||||
|
||||
|
||||
Этот формат можно легко преобразовать в стандартные определения типов данных IDL или XML. Это происходит как побочный продукт сборки ROS2 из исходников. Однако файлы IDL несколько разбросаны среди промежуточных файлов, которые создаются при сборке ROS2.
|
||||
|
||||
К счастью, есть более простой способ. На сайте [RTI Community GitHub](https://github.com/rticommunity/ros-data-types) RTI поддерживает предварительно преобразованный набор файлов IDL модели данных ROS2, упорядоченный так, чтобы его можно было легко построить, включить и использовать в любом приложении, которое должно взаимодействовать с ROS2
|
||||
|
||||
## Создание библиотеки поддержки типов ROS2
|
||||
|
||||
Этот проект настроен для создания статической библиотеки и файлов заголовков на ваш выбор: C, C ++ (традиционный) или C ++ 11 («Современный C ++»). При этом используется CMake для упрощения процесса сборки и генератор кода RTI, в результате чего код переносится на разные платформы, процессоры и операционные системы / RTOS. Я построил этот пример в Linux; другие хосты также поддерживаются.
|
||||
|
||||
Откройте терминал в каталоге для сборки этого проекта, затем введите следующие команды для клонирования и сборки библиотеки:
|
||||
|
||||
```shell
|
||||
git clone https://github.com/rticommunity/ros-data-types.git ros-data-types
|
||||
|
||||
source ~/rti_connext_dds-6.0.1/resource/scripts/rtisetenv_x64Linux3gcc5.4.0.bash
|
||||
|
||||
cmake -Hros-data-types -Bros-data-types/build \ -DCMAKE_INSTALL_PREFIX=ros-data-types/install -DLANG=C++11
|
||||
|
||||
cmake --build ros-data-types/build -- install
|
||||
```
|
||||
|
||||
Этап сборки может занять несколько минут (обратите внимание, что модель данных ROS2 включает более сотни определений типов данных), а результаты будут помещены в ./ros-data-types/install.
|
||||
|
||||
Этот каталог содержит:
|
||||
| Путь | Описание |
|
||||
| ------ | ------ |
|
||||
| `install/lib/libRosDataTypes.a` | Статическая библиотека поддержки типа данных DDS для ROS2 |
|
||||
| `install/include/*` | Дерево заголовочных файлов для использования библиотеки |
|
||||
|
||||
## Давайте взаимодействовать
|
||||
|
||||
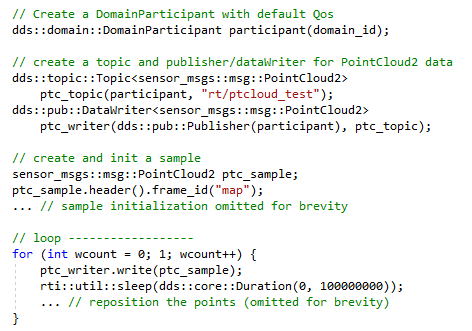
В качестве простого примера взаимодействия давайте создадим небольшую программу, не относящуюся к ROS, которая будет публиковать данные трехмерного облака точек с использованием типа данных ROS2 «PointCloud2» для просмотра с помощью визуализатора «RViz2» в ROS2. Для тех, кто имеет опыт разработки ROS. приложения, написание кода с использованием собственного API Connext C ++ 11 будет выглядеть очень знакомо:
|
||||
|
||||
Connext API используется внутри ROS2 при запуске на уровне Connext RMW. Мы просто обходим уровни ROS2, чтобы получить полный доступ к Connext.
|
||||
|
||||
RTI теперь предлагает новый уровень Connext RMW, который мы разработали с нуля, чтобы упростить код и значительно повысить производительность, обеспечивая доступ «под ключ» к мощным инструментам разработки распределенных систем RTI (подробности см. В официальном объявлении ).
|
||||
|
||||
В этом примере для создания данных облака точек используется один исходный файл. Код очень компактный:
|
||||
|
||||
|
||||
|
||||
В этом примере используется чистый C ++ 11 API для Connext - без помощи каких - либо добавленных оберток или инкапсуляция - но это по - прежнему очень компактный, очень легко понять, и работает на максимальной производительности из - за отсутствия промежуточных слоев программного обеспечения . Полный набор возможностей Connext доступен напрямую из этого API, и он легко взаимодействует с ROS2.
|
||||
|
||||
## Сборка и запуск приложения
|
||||
|
||||
В примере используется вспомогательный сценарий RTI CMake, выделенный в предыдущем блоге для упрощения процесса сборки на разных платформах (Linux, Windows и т. Д.), Что приводит к правильно настроенным файлам make / solution для сборки приложения.
|
||||
|
||||
На хосте Linux это выглядит так:
|
||||
|
||||
```shell
|
||||
mkdir build; cd build
|
||||
|
||||
cmake -G «Unix Makefiles» ..
|
||||
|
||||
make
|
||||
```
|
||||
|
||||
После того, как приложение построено, его можно запускать непосредственно в терминале:
|
||||
|
||||
```shell
|
||||
build / ptc_demo
|
||||
```
|
||||
|
||||
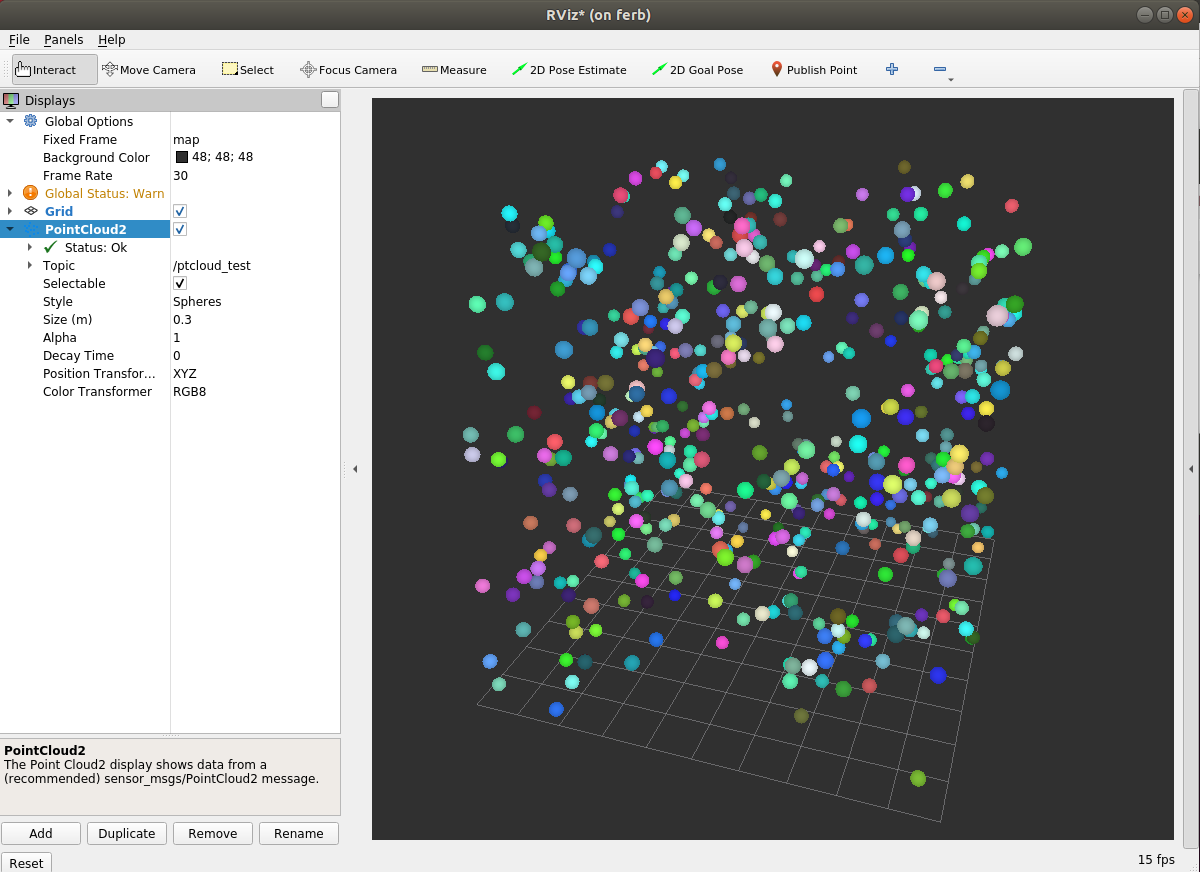
Чтобы визуализировать данные облака точек, запустите визуализатор ROS2 «RViz2» и с помощью кнопки и вкладки «Add .. by topic» выберите топик PointCloud2 с именем «ptcloud_test». Вы должны увидеть изображение, подобное этому:
|
||||
|
||||
|
||||
|
||||
## Вывод
|
||||
|
||||
ROS2 предоставляет удобную среду для создания приложений робототехники, но есть много мест, где требуется максимальная производительность и полный набор возможностей, доступных в Connext DDS. Непосредственно используя Connext с моделью данных ROS2, разработчики систем могут получить лучшее из обоих - весь диапазон и производительность Connext И полноценное использование экосистемы ROS2 - эффективно умножая свой набор инструментов для создания полностью оптимизированных систем.
|
||||
|
||||
## Ссылки на ресурсы
|
||||
|
||||
[Типы данных ROS2 в IDL](https://github.com/rticommunity/ros-data-types)
|
||||
|
||||
[Пример кода приложения](https://community.rti.com/ros)
|
||||
|
||||
[Уровень Connext RMW](https://github.com/rticommunity/rmw_connextdds/)
|
||||
BIN
docs/technologies/img/moveit2_architecture.png
Normal file
BIN
docs/technologies/img/moveit2_architecture.png
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 1.1 MiB |
10
docs/technologies/moveit2.md
Normal file
10
docs/technologies/moveit2.md
Normal file
|
|
@ -0,0 +1,10 @@
|
|||
---
|
||||
id: moveit2
|
||||
title: 'Moveit2 и как устроен'
|
||||
---
|
||||
|
||||
## Moveit2
|
||||
|
||||
Кратко о текущем состоянии порта Moveit2
|
||||
|
||||

|
||||
418
docs/technologies/o2ac-repo-review.md
Normal file
418
docs/technologies/o2ac-repo-review.md
Normal file
|
|
@ -0,0 +1,418 @@
|
|||
---
|
||||
id: o2ac-repo-review
|
||||
title: 'Команда o2ac есть чему поучиться'
|
||||
---
|
||||
## Предыстория
|
||||
|
||||

|
||||
|
||||
Команда O2AC на World Robot Summit 2020 Assembly Challenge состояла из представителей OMRON SINIC X , OMRON , Osaka University, National Institute for Advanced Science and Technology (AIST) и Chukyo University.
|
||||
|
||||
[Репозиторий](https://github.com/o2ac/o2ac-ur) который недавно был выложен на платформу GitHub данной командой, является их открытым исходным кодом, где представлено множетсво полезных решений в области автоматизированной сборки робототехническим сборочным комплексом. Их решение сводилось к полной автоматизации заранее заданной происзводственной операции. Итак рассмотрим основные фичи, которые были продемонстрированы этой командой
|
||||
|
||||
1. Всё програмное обеспечение строилось на основе _ROS Kinetic_ в Docker контейнере
|
||||
2. Используются одновременно 2 робота-манипулятора без риска столкновения
|
||||
3. Вставка детали в отверстие производится с помощью контроля импеданса
|
||||
4. Выравнивание детали производится за счёт сестемы технического зрения на библиотеке _OpenCV_
|
||||
5. Планирование следующего дейтсвия выполняется в момент выполнения траектории роботом-манипулятором, что оптимизирует общее время выполнения операции
|
||||
6. Автоматизированное закручивание винтов
|
||||
7. Используется собственно разработанный инструмент для затягивания винтов
|
||||
8. Обнаружение и захват деталей расположенных в лотке неструктурировано
|
||||
9. Для установленных деталей используется библиотека TF которая содержит локальную систему координат каждого установленного элемента
|
||||
|
||||
## Обзор репозитория
|
||||
|
||||
Репозиторий состоит из 19 пакетов, в том числе есть пакеты которые достойны рассмотрения для реализации нашего Робосборщика. Кратко пройдёмся по каждому из них.
|
||||
|
||||
### aist_modules
|
||||
|
||||
Данный пакет является метапакетом и разрабатывался членами команды из университета AIST. Он включает себя пакеты для 3D локализации и калибровки камер. Данный пакет можно рассмотреть в качестве альтернативы, но на сегодняшний момент возможно найдутся и другие пакеты которые справятся лучше.
|
||||
|
||||
### o2ac_assemble_database
|
||||
|
||||
Данный пакет содержит базу данных, а также классы и их методы для загрузки сборок в сцену планирования MoveIt.
|
||||
|
||||
Загрузка данных для сборки производится за счёт [Python скрипта](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_assembly_database/src/o2ac_assembly_database/parts_reader.py) `parts_reader.py` который загружает объекты в сцену как объекты с коллизией из исходных `.yaml` файлов в папке `o2ac_assembly_database/config/name_of_config/`. Также в данной базе данных присуствует информация о позиционировании захватного устройства, при захвате детали. Все эти данные загружаются непосредственно на сервер ROS откуда они уже забираются определённой нодой. Такая архитектура свойственна для ROS1, для ROS2 подход координально отличается, потому что параметры загружаются в ноду непосредственно при её запуске.
|
||||
|
||||
Если предыдущий скрипт брал геометрию каждой детали и публиковал их в сцену MoveIt, то следующий [скрипт](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_assembly_database/src/o2ac_assembly_database/assembly_reader.py) `Assembly_reader.py` делает всё тоже самое, но также ведёт обработку древовидной сборки и публикацию данной сборки в TF формате. То есть прямым образом заносит информацию на сервер какая деталь куда должна устанавливаться. Отдельно интересует данный фрагмент кода:
|
||||
|
||||
```python
|
||||
def get_frame_mating(self, base_object, child_object):
|
||||
'''
|
||||
Эта функция возвращает сопряжение двух деталей в сборке в виде сообщения geometry_msgs / Transform.
|
||||
Вход 'base_object' - это строка, определяющая имя объекта, на который будет помещен дочерний объект.
|
||||
Вход 'child_object' - это строка, определяющая имя объекта, который будет помещен в базовый объект.
|
||||
Возвращает None, если между двумя объектами не определено сопряжение или объекты не являются частью загруженной сборки.
|
||||
'''
|
||||
base_object_id = next((part['id'] for part in self._parts_list if part['name'] == base_object), None)
|
||||
child_object_id = next((part['id'] for part in self._parts_list if part['name'] == child_object), None)
|
||||
transform = next((mating_transform for mating_transform in self.mating_transforms if int(mating_transform.header.frame_id.split('_')
|
||||
[1]) == base_object_id and int(mating_transform.child_frame_id.split('_')[1]) == child_object_id), None)
|
||||
if transform is not None:
|
||||
frame_mating = get_transform(parent_frame=base_object + '/' + '_'.join(transform.header.frame_id.split('_')[2:]),
|
||||
child_frame=child_object + '/' + '_'.join(transform.child_frame_id.split('_')[2:]),
|
||||
transform=transform.transform)
|
||||
return frame_mating
|
||||
else:
|
||||
return None
|
||||
```
|
||||
|
||||
То есть данный фрагмент кода в соостветсвии с полученной базой данной последовательности сборки проверяет что куда устанавливать, выходом данной функции соответствует переменная `frame_mating` которая "судя по всему" является фреймом стыковки двух деталей.
|
||||
|
||||
Так как же обрабатывается последовательность сборки двух деталей. Об этом нам скажет следующий фрагмент скрипта:
|
||||
|
||||
```py
|
||||
def get_assembly_tree(self, collision_objects=[]):
|
||||
'''
|
||||
Возвращает цель сборки в виде древа преобразования TF
|
||||
'''
|
||||
self.mating_transforms = self._read_frames_to_mate_csv()
|
||||
if not self.mating_transforms:
|
||||
rospy.loginfo("No assembly tree defined")
|
||||
return False
|
||||
base_id = int(self.mating_transforms[0].header.frame_id.split('_')[1]) # Имя фрейма - "part_NN _...""
|
||||
base_name = next((part['name'] for part in self._parts_list if part['id'] == base_id), None)
|
||||
base_object = next((collision_object for collision_object in self._collision_objects if collision_object.id == base_name), None)
|
||||
assembly_tree = self._collision_object_to_tf_tree(base_object)
|
||||
for mating_transform in self.mating_transforms:
|
||||
child_id = int(mating_transform.child_frame_id.split('_')[1])
|
||||
child_name = next((part['name'] for part in self._parts_list if part['id'] == child_id), None)
|
||||
child_object = next((collision_object for collision_object in self._collision_objects if collision_object.id == child_name), None)
|
||||
tree_2 = self._collision_object_to_tf_tree(child_object)
|
||||
mating_transform.header.frame_id = mating_transform.header.frame_id
|
||||
mating_transform.child_frame_id = mating_transform.child_frame_id
|
||||
self._add_part_to_assembly_tree(assembly_tree, tree_2, mating_transform)
|
||||
|
||||
return assembly_tree
|
||||
|
||||
```
|
||||
|
||||
То есть после загрузки данных о деталях как последовательность сборки, формирутеся древо преобразований TF, в котором содержится информация о том что где должно стоять. Также есть интересная [функция](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_assembly_database/src/o2ac_assembly_database/assembly_reader.py#L244-L290), которая непосредственно отвечает за добавление одной последовательности в другую
|
||||
|
||||
Следующий скрипт `visualise_metadata.py` предназначен лишь для отображения позиция захвата деталей в сцене.
|
||||
|
||||
Также в пакете присуствуют файлы для описания последовательности сборки:
|
||||
|
||||
* `'name_of_parts'.yaml` - содержит описание для подфреймов и захватных поз для деталей по именам. Все они загружаются на сервер, где к ним можно получить доступ через `/'assembly_name'/'object_name'/'grasp_name'`. Либо получить все фреймы для захвата детали через `'assembly_name'/'object_name'`
|
||||
* `frame_to_mate.csv` - содержит описание стыковки деталей в сборке. Сопряжение определяется между подфреймами двух деталей.
|
||||
* `parts_list.yaml` - содержит список деталей в сборке `id`,`name` и `cad` поле
|
||||
|
||||
### o2ac_dynamixel
|
||||
|
||||
В рамках проекта Робосборщик, данный пакет не представляет интереса из-за его специфичности. В общем этот пакет является драйвером для двигателя Dynamixel.
|
||||
|
||||
### o2ac_examples
|
||||
|
||||
Пакет содержит реализацию подключения физического робототехнического комплекса O2AC и различные примеры с MoveIt. При запуске примеров, он обращается к базе данных, которая использовалась на WRC2020.
|
||||
|
||||
### o2ac_fastening_tools
|
||||
|
||||
Этот пакет контролирует крепежные инструменты, которые приводятся в действие двигателем XL320. Он также управляет механизмами всасывания и выпускания.
|
||||
|
||||
### o2ac_flexbe
|
||||
|
||||
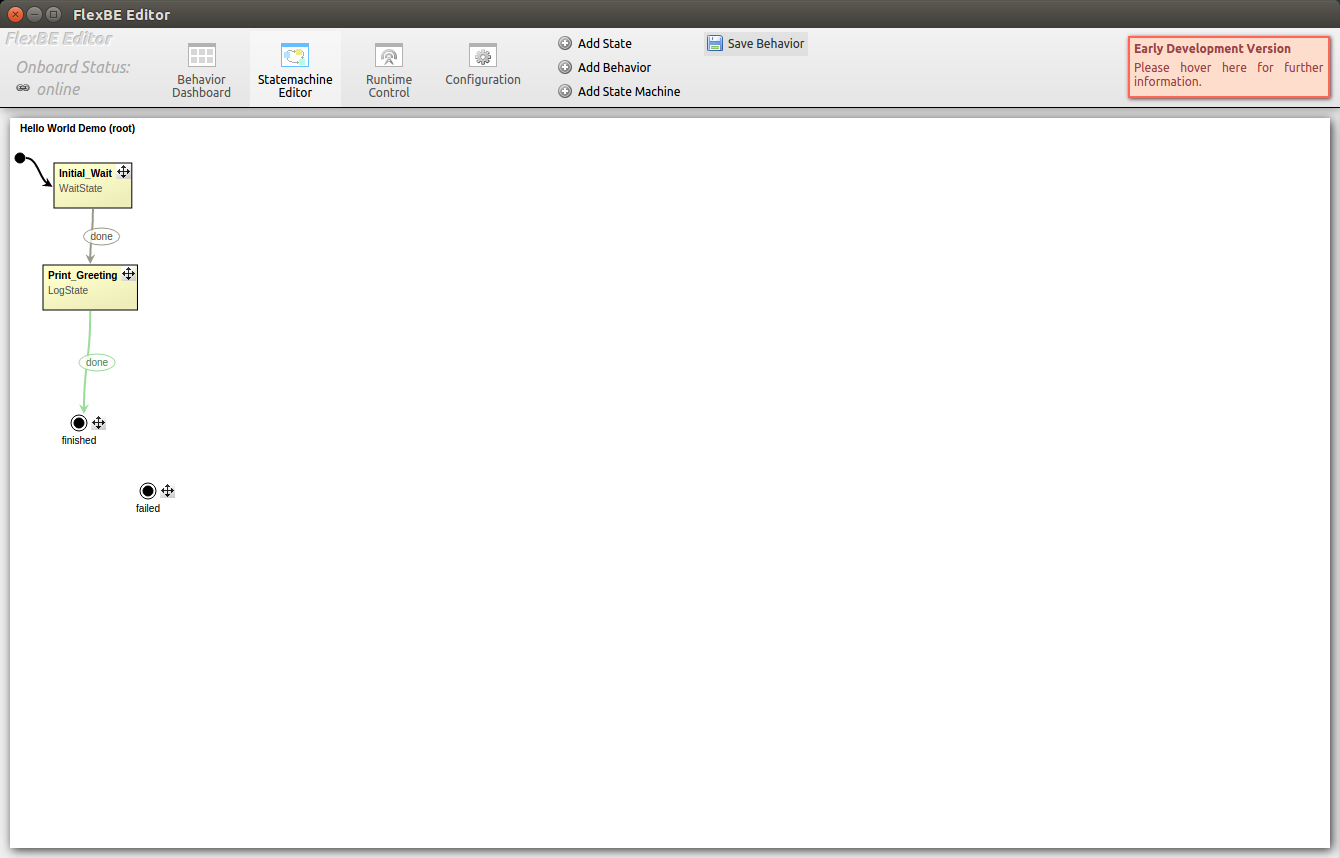
Данный пакет построен за счёт инструмента налаживания логики конечных автоматов (state machines) под названием Flexbe. К сожалению на данный момент этот инструмент не портирован для ROS2, но является достаточно облегчающим в разработке последовательности действий автоматизированного роботизированного сборочного комплекса.
|
||||
|
||||
Каждое состояние описывается определёнными функциями в скрипте Python.
|
||||
|
||||
```py
|
||||
def execute(self, userdata):
|
||||
|
||||
def on_enter(self, userdata):
|
||||
|
||||
def on_exit(self, userdata):
|
||||
|
||||
def on_start(self):
|
||||
|
||||
def on_stop(self):
|
||||
```
|
||||
|
||||
Далее подобные состояния комбинируются за счёт графического интерфейса Flexbe и генерируется повередние робота
|
||||
|
||||
|
||||
|
||||
## o2ac_gazebo
|
||||
|
||||
Данный репозиторий включает сцену симуляции Gazebo для робототехнического сборочного комлпекса O2AC и не включает ничего специфичного, по типу плагинов для данной сцены.
|
||||
|
||||
## o2ac_moveit_config
|
||||
|
||||
Содержит стандартный конфигурацию для moveit подготовленную с помощью moveit_setup_assistant. Из нестандартного здесь представлен pilz_industrial_motion_planner который по-умолчанию не включен в moveit и интегрируется одельно, данный планер предоставляет удобный интерфейс реализации декартовых траекторий.
|
||||
|
||||
## o2ac_msgs
|
||||
|
||||
Содержит все используемые сообщения, сервисы и действия используемые в проекте. Список следующий:
|
||||
|
||||
### Сообщения
|
||||
|
||||
В основном все сообщения основаны на проверки текущей позы манипулятора, список следующий
|
||||
|
||||
* [Estimated2DPoses.msg](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/msg/Estimated2DPoses.msg)
|
||||
* [Estimated2DPosesArray.msg](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/msg/Estimated2DPosesArray.msg)
|
||||
* [Estimated3DPoses.msg](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/msg/Estimated3DPoses.msg)
|
||||
* [LookObservation.msg](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/msg/LookObservation.msg)
|
||||
* [PlaceObservation.msg](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/msg/PlaceObservation.msg)
|
||||
* [RobotStatus.msg](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/msg/RobotStatus.msg)
|
||||
* [TouchObservation.msg](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/msg/TouchObservation.msg)
|
||||
|
||||
## Сервисы
|
||||
|
||||
Также представлен набор сервисом для управления, рассмотрим список
|
||||
|
||||
* [FindObject.srv](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/srv/FindObject.srv)
|
||||
* Принимает на вход
|
||||
* `geometry_msgs/PoseStamped` Где ожидается объект
|
||||
* `float64` Насколько далеко объект может быть от ожидаемой позиции (в метрах)
|
||||
* `string` Деталь для обнаружения, например, "4" для двигателя
|
||||
* `string` Камера, которая будет использоваться для распознавания ("phoxi", "a_bot_realsense" ...)
|
||||
* Выдаёт на выходе
|
||||
* `bool` истина/ложь о факте нахождения объекта
|
||||
* `geometry_msgs/PoseStamped` позицию объекта
|
||||
* [goToNamedPose.srv](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/srv/goToNamedPose.srv)
|
||||
* Принимает на вход
|
||||
* `string` Имя заранее определённой позиции в move_group как позицию каждого шарнира
|
||||
* `string` Имя группы планирования, заранее определённой в move_group
|
||||
* Выдаёт на выходе
|
||||
* `bool` успех операции
|
||||
* [pc2depth.srv](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/srv/pc2depth.srv)
|
||||
* Принимает на входе
|
||||
* `string` имя топика, по которому передаётся облако точек
|
||||
* Выдаёт на выходе
|
||||
* `sensor_msgs/Image` изображение
|
||||
* [publishMarker.srv](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/srv/publishMarker.srv)
|
||||
* Принимает на вход
|
||||
* `geometry_msgs/PoseStamped` позицию для установки маркера в RViz
|
||||
* `string` тип маркера
|
||||
* Выдаёт на выходе
|
||||
* Ничего не выдаёт
|
||||
* [sendScriptToUR.srv](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/srv/sendScriptToUR.srv)
|
||||
* Принимает на вход
|
||||
* Общие параметры
|
||||
* `string` имя робота
|
||||
* `string` имя исполняемой программы
|
||||
* Параметры для спирального поиска и линейного поиска
|
||||
* `float64` Сила, которую применяет spiral_search или linear_search в Ньютонах
|
||||
* `string` Направление движения робота в spiral_search / linear_search в виде строки (обычно X + или Z-) (НЕ ИСПОЛЬЗУЕТСЯ, если установлен force_direction_vector)
|
||||
* `float64[]` То же, что и выше, но как вектор направления [x, y, z] в захвате TCP. РАБОТАЕТ ТОЛЬКО ДЛЯ LINEAR_SEARCH
|
||||
* `float64[]` Размер спирали. В м. По умолчанию: 0,0065
|
||||
* `float64[]` Как быстро спираль увеличивается в размере за один оборот. В м. По умолчанию: 0,002
|
||||
* `float64[]` Угловое приращение (в градусах!), на которое нарезается каждый поворот.
|
||||
* `geometry_msgs/Vector3` Для вставки и spiral_search. В Н/м. Система координат звена инструмента.
|
||||
* `float64` Скорость, с которой "insert" и linear_search продвигаются вперед. Чем медленне, вероятно, точнее.
|
||||
* `float64` Для метода линейного поиска в метрах
|
||||
* `bool` peck_mode - использутеся в спиральном поиковом движении
|
||||
* `bool` use_base_coords - для линейного поиска (linear_search)
|
||||
* Для спирального движения
|
||||
* `string` «X», «Y», «Z», «YZ» (45 градусов), «Y30Z60» (30 градусов). В захвате CSYS.
|
||||
* `string` "X", "Y", "Z". В захвате CSYS.
|
||||
* `float64` Насколько движение продвигается вперед за полный оборот
|
||||
* `float64` Когда движение вперед заканчивается
|
||||
* `float64` (Максимальная дистанция вставки элемента)
|
||||
* `float64` Масса, используемая для контроля импеданса (по умолчанию: 10 кг)
|
||||
* Для линейного передвижения реального робота
|
||||
* `geometry_msgs/PoseStamped` целевая поза для линейного перемещения
|
||||
* `float64` ускорение, параметр move_1 (по умолчанию: 0.5)
|
||||
* `float64` скорость, параметр move_1 (по умолчанию: 0.05)
|
||||
* Линейное движение
|
||||
* `geometry_msgs/Point` для линейного перемещения последнего звена в его координатах (Z+ вперёд)
|
||||
* `geometry_msgs/Point` для линейного перемещения в формате UR (угол-ось)
|
||||
* `bool` если false, тогда TCP. Если true, тогда точка базы
|
||||
* Позиции звеньев
|
||||
* `float64` позиции звеньев
|
||||
* Для грубой или адаптивной вставки
|
||||
* `float64[]` целевая сила для грубого режима
|
||||
* `float64[]` целевая поза для грубого режима
|
||||
* `float64[]` целевая скорость для грубого режима
|
||||
* `float64[]` движение для команды перемещения робота
|
||||
* `bool` переключение между точками world и TCP для интерпретации вышеуказанных значений
|
||||
* `string` Ось выравнивания UR в грубом режиме
|
||||
* Новая поза TCP
|
||||
* `float64` устанавливает преобразование из системы координат TCP как позу. С помощью команды URscript set_tcp (tcp_pose)
|
||||
* Выдаёт на выходе
|
||||
* `bool` успех
|
||||
* [visualizePoseBelief.srv](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_msgs/srv/visualizePoseBelief.srv)
|
||||
* Принимает на входе
|
||||
* `moveit_msgs/CollisionObject` (комментария нет, надо посмотреть состав сообщения)
|
||||
* `uint8`
|
||||
* `geometry_msgs/PoseWithCovarianceStamped`
|
||||
* `duration`
|
||||
* `uint8` по умолчанию RPY_COVARIANCE = 0
|
||||
* `uint8` по умолчанию LIE_COVARIANCE = 1
|
||||
* Выдаёт на выходе
|
||||
* Ничего не выдаёт
|
||||
|
||||
### Действия
|
||||
|
||||
Действия в ROS являются базовым конструктором связи с состоят из клиента и сервера. Модель такова, что клиент отсылает цель(запрос) серверу, который заточен на выполнение определённой операции и получает результат этого действия. В данном репозитории присутствует огромная библиотека действий, подразделяемая также на общие, техническое зрение и поведение. Рассмотрим список общих действий в проекте:
|
||||
|
||||
* DynamixelGripperCommand.action
|
||||
* ScrewToolControl.action
|
||||
* SuctionControl.action
|
||||
* changeTool.action
|
||||
* estimateTooltipDistance.action
|
||||
* insert.action
|
||||
* pickScrewFromFeeder.action
|
||||
* place.action
|
||||
* regrasp.action
|
||||
* screw.action
|
||||
* suckScrew.action
|
||||
* updateDistribution.action
|
||||
|
||||
Рассмотрим список действия для технического зрения
|
||||
|
||||
* beltDetection.action
|
||||
* checkPickSuccess.action
|
||||
* detectAngle.action
|
||||
* detectCableTip.action
|
||||
* detectObjectTip.action
|
||||
* detectOrientation.action
|
||||
* get2DPosesFromSSD.action
|
||||
* get3DPosesFromSSD.action
|
||||
* getGraspCandidates.action
|
||||
* getTipDistanceToHole.action
|
||||
* localizeObject.action
|
||||
* shaftHoleDetection.action
|
||||
* shaftNotchDetection.action
|
||||
|
||||
Рассмотрим список действия поведения робота
|
||||
|
||||
* AlignBearingHoles.action
|
||||
* Fasten.action
|
||||
* FastenBearing.action
|
||||
* Handover.action
|
||||
* Insert.action
|
||||
* MoveTo.action
|
||||
* Orient.action
|
||||
* Pick.action
|
||||
* PlayBackSequence.action
|
||||
|
||||
## o2ac_parts_description
|
||||
|
||||
Данный пакет не эксплуатировался в последней версии проекта представленной на WRC2020, соответственно опустим
|
||||
|
||||
## o2ac_routines
|
||||
|
||||
Данный пакет является основным в перечне и предоставляет скрипты Python и управляющие программы C++ для управления всей роботизированной системой.
|
||||
|
||||
* taskboard.py и assembly.py запусают конкурсные задания
|
||||
* calibration.py и osx_view_testing.py являются процедурами калибровки и тестирования
|
||||
* Остальные файлы (например test.py) предназначены для разных тестов и прочего неважного кода.
|
||||
|
||||
### Класс Controller
|
||||
|
||||
* [`common.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/common.py) определён в [`base.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/base.py) и предлагает класс для управления всей роботизированной системой. Этот класс ( O2ACCommon) владеет другими классами, которые управляют разными подсистемами:
|
||||
* Робот руки (с помощью [`robot_base.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/robot_base.py), [`ur_robot.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/ur_robot.py), [`dual_arm.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/dual_arm.py), [`robotiq_gripper.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/robotiq_gripper.py) и [`ur_force_control.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/ur_force_control.py))
|
||||
* Система технического зрения (через [`vision_client.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/vision_client.py))
|
||||
* Винтовые инструменты (через [`tools.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/tools.py))
|
||||
* [`taskboard.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/taskboard.py) и [`assembly.py`](https://github.com/o2ac/o2ac-ur/blob/main/catkin_ws/src/o2ac_routines/src/o2ac_routines/assembly.py) определены в O2ACCommon с помощью переменных и функций для конкретных задач
|
||||
|
||||
### Последовательность действий
|
||||
|
||||
Они реализуют командные последовательности, в которых следующее движение либо планируется, в то время как предыдущее движение выполняется, либо совместные траектории могут сохранены или загружены в или из файла для выполнения, не требуя дополнительного времени на планирование.
|
||||
|
||||
Для примера см. `subtask_zero` метод в `src/o2ac_routines/src/assembly.py`.
|
||||
|
||||
Также см. [Pilz_robot_programming](https://github.com/PilzDE/pilz_industrial_motion/tree/melodic-devel/pilz_robot_programming), чтобы узнать об альтернативной реализации Python, которая, вероятно лучше
|
||||
|
||||
## o2ac_rviz
|
||||
|
||||
Данный пакет включает в себя виджет для RViz, созданный для манипуляции и отладки процесса сборки. Каждый плагин для RViz пишется с использованием библиотеки Qt и интегрируется за счёт специального файла XML с описанием данного плагина.
|
||||
|
||||
## o2ac_scene_description
|
||||
|
||||
Данный пакет включает в себя описание роботизированной системы и сцен. Определения деталей можно найти в o2ac_parts_description. Сцены описаны с помощью фалов xacro (macro XML) и URDF (Unifined Robotic Description Format).
|
||||
|
||||
## o2ac_skills
|
||||
|
||||
Данный пакет не эксплуатировался в последней версии проекта представленной на WRC2020, соответственно опустим
|
||||
|
||||
## o2ac_task_planning
|
||||
|
||||
Данный пакет не эксплуатировался в последней версии проекта представленной на WRC2020, соответственно опустим
|
||||
|
||||
## o2ac_vision
|
||||
|
||||
Этот пакет содержит узлы, которые выполняют и передают дейсвия (actions) для комиьютерного зрения, например:
|
||||
|
||||
* Обнаружение объектов (SSD)
|
||||
* Оценка позы детали (соответствие САПР)
|
||||
* Определение позы захвата ремня
|
||||
* Оценка вращения подшипника
|
||||
|
||||
Все навыки зрения основаны на действиях, поэтому расчетам разрешается сбой и тайм-аут.
|
||||
|
||||
Для этого узлы Python объявляют ряд действий, определенных в o2ac_msgs.
|
||||
|
||||
### Распознавание деталей
|
||||
|
||||
Узел распознавания детали состоит из двух компонентов. Один - это обнаружение объекта (Chukyo), другой - оценка позы (AIST).
|
||||
|
||||
#### Подготовка
|
||||
|
||||
Для модуля распознавания деталей требуются предварительно обученные шаблоны. Которые загружаются по следующим ссылкам:
|
||||
|
||||
* Предварительно обученные веса модели SSD. Которые переименовываются и загружаются в `WRS.pth` и помещаются в `wrs_dataset/ssd.pytorch`.
|
||||
* Шаблоны изображений для обнаружения мелких деталей:[скачивание](https://drive.google.com/file/d/1EVTEMdHeOtzsVI9YkVpjS8h_67EkjK4k/view)
|
||||
* Поместите `templates` в `wrs_dataset/data/`
|
||||
* Шаблон изображения для оценки угла Беринга: [скачивание](https://drive.google.com/drive/folders/1qjwkHFLJ4KVpx1_S5BJLbSMZ4lKvtRPZ)
|
||||
* Поместить `bearing_template_image.png` и `shaft_template_image.png` в `o2ac_vision/config`.
|
||||
|
||||
#### Обнаружение объектов
|
||||
|
||||
Скрипты Python для Single Shot MultiBox Detector (SSD) основаны на [ssd.pytorch](https://github.com/amdegroot/ssd.pytorch) . Этот модуль обнаруживает несколько объектов в лотке. Возвращает список в формате словаря, который содержит рамку выделения, идентификатор класса, состояние (перевернут или нет) и достоверность.
|
||||
|
||||
#### Оценка позы для мелких деталей
|
||||
|
||||
Этот компонент оценивает двухмерную позу (x, y, theta) малых целей в системе координат изображения. Он передает выходные данные модуля обнаружения объектов, список ограничивающей рамки и идентификатор класса объекта.
|
||||
|
||||

|
||||
|
||||
#### Оценка позиции двигателя и подшипниковой опоры
|
||||
|
||||
Этот компонент вычисляет угол поворота в плоскости подшипниковой опоры с использованием алгоритма ICP. Возвращает угол поворота против часовой стрелки и горизонтальное смещение.
|
||||
|
||||

|
||||
|
||||
### Порядок распознавания (AIST)
|
||||
|
||||
Вы можете построить порядок дейсвий от получения изображения до распознавания 3D - объектов, а также локализации с использованием `o2ac_vision` пакета, в сочетании с другими пакетами компьютерного зрения, т.е. `aist_depth_filter`, `aist_localization` и `aist_model_spawner`(по желанию). Порядок дейсвтий показан на следующем рисунке:
|
||||
|
||||

|
||||
|
||||
где приложение пользователя отображается зеленым цветом. Это клиентский узел, `o2ac_msgs.localizeObjectAction` который определяется как:
|
||||
|
||||
```shell
|
||||
# Goal
|
||||
string item_id
|
||||
# (optional)
|
||||
geometry_msgs/PoseWithCovarianceStamped expected_pose
|
||||
---
|
||||
# Result
|
||||
bool succeeded
|
||||
float32[] confidences
|
||||
geometry_msgs/PoseStamped[] detected_poses
|
||||
# (optional)
|
||||
geometry_msgs/PoseWithCovarianceStamped[] detected_poses_with_covariance
|
||||
```
|
||||
|
||||
Клиент запрашивает `/object_recognizer` найти объекты, указанные в `item_id` поле. В это время `item_id` должен быть именем файла сетки (без суффикса) , определенным в `o2ac_parts_description/meshes`, например `01-Base`, `04_37D-GEARMOTOR-50-70`, `08_KZAF1075NA4WA55GA20AA0` и т.д.
|
||||
|
||||
Порядок распознавания работает следующим образом
|
||||
|
||||
1. Когда в цели указан ID распознаваемого объекта, объект `/object_recognizer` отправляет цель `o2ac_msgs.get2DPosesFromSSDAction` типа в объект `/object_detector`.
|
||||
2. В `/object_detector` ведётся поиск всех известных объектов через [SSD](#обнаружение-объектов), а затем возвращает часть ID и выделающая рамка к `/object_recognizer` для каждого объекта.
|
||||
3. Для каждой небольшой детали `/object_detector` также применяет сопоставление с шаблоном, которое определяет ее 2D-положение и ориентацию в выделяющей рамке. Они возвращаются `/object_recognizer` вместе с результатами SSD.
|
||||
4. Для круглой ленты `/ object_detector` находит точки захвата, применяя детектор FGE (Fast Graspability Estimation). Точки захвата представлены его двухмерным положением и ориентацией оси движения двухпальцевого захвата. Как правило, на одном ремне можно найти несколько точек захвата. Они возвращаются в `/ object_recognizer` вместе с результатами SSD.
|
||||
5. После получения ID детали и выделяющей рамки `/ object_recognizer` дает команду `/depth_filter` создать облако точек в подобласти, соответствующей ограничивающей рамке. Созданное облако точек сохраняется в `~/.ros/scene.ply` в формате Stanford PLY.
|
||||
6. Для общих деталей, ни маленьких, ни ленточных, узел `/localization` восстанавливает файл PLY и выполняет трехмерное сопоставление с сетками, хранящимися в `o2ac_parts_description` . Если процесс сопоставления успешен, трехмерное положение и ориентация детали, а также значения достоверности возвращаются в результате типа `o2ac_msgs.localizeObjectAction` . Если найдено несколько поз-кандидатов, они сохраняются в порядке убывания значений достоверности.
|
||||
7. Для небольших деталей и ремней узел `/localization` преобразует их 2D-положения и ориентации в 3D-позы в предположении, что объекты лежат на «доминирующей плоскости». `Доминирующая плоскость` определяется по всему изображению глубины с помощью `/depth_filter` с надежной подгонкой плоскости с использованием RANSAC. Обнаруженный самолет публикуется в сообщении типа `aist_depth_filter.FileInfo` и подписывается узлом `/localization`.
|
||||
|
||||
Пример клиентской программы `o2ac_vision / scripts / o2ac_recognition_client_example.py` показывает, как использовать порядок распознавания из пользовательских прикладных программ. Образец также предоставляет средства для визуализации результатов 3D-локализации с помощью `aist_model_spawner`.
|
||||
|
||||
## o2ac_visualisation
|
||||
|
||||
Данный пакет предосатвляет плагин визуализации состояния системы как для облегчения отладки, так и для демонстрации.
|
||||
|
||||
## wrs_dataset
|
||||
|
||||
Данный пакет содержит датасет Pytorch, используемые в пакете o2ac_vision для обучения распознавания объектов.
|
||||
|
|
@ -1,4 +1,4 @@
|
|||
module.exports = {
|
||||
module.exports = {
|
||||
docs: [
|
||||
{
|
||||
type: 'category',
|
||||
|
|
@ -30,7 +30,14 @@
|
|||
'technologies/wood',
|
||||
'technologies/machine-learning-in-robotics',
|
||||
'technologies/gripper-tools-research',
|
||||
<<<<<<< sidebars.js
|
||||
'technologies/o2ac-repo-review',
|
||||
'technologies/moveit2.md',
|
||||
'technologies/dds_and_ros2.md',
|
||||
'technologies/plansys2'
|
||||
=======
|
||||
'technologies/plansys2'
|
||||
>>>>>>> sidebars.js
|
||||
],
|
||||
},
|
||||
{
|
||||
|
|
|
|||
Loading…
Add table
Add a link
Reference in a new issue