| .. | ||
| bt_benchmark | ||
| bt_default | ||
| bt_rosbag | ||
| benchmark_result.png | ||
| gazebo_rbs_arm.png | ||
| README.md | ||
{kind=link}
{kind=link}
Пример запуска симуляции (runtime) сцены с роботом
Запустить последовательно четыре терминала и выполнить запуск 3-х launch-файлов и симулятора Gazebo:
Во всех терминалах выполнить предварительную настройку:
# ROS2
source /opt/ros/humble/setup.bash
# Robossembler
cd ~/robossembler-ws
source install/setup.bash
- 1 - запуск интерфейсной ноды с серверами навыков
ros2 launch rbs_bt_executor interface.launch.py bt_path:=src/robossembler-ros2/test_examples/bt_default
- 2 - запуск runtime с роботом в сцене
ros2 launch rbs_bringup rbs_bringup.launch.py
- 3 - запуск Gazebo (для визуализации процесса)
ign gazebo -g
- 4 - запуск дерева поведения
ros2 launch rbs_bt_executor rbs_bt_web.launch.py bt_path:=src/robossembler-ros2/test_examples/bt_default
Чтобы наблюдать сцену с движением робота, нужно перейти в окно Gazebo.
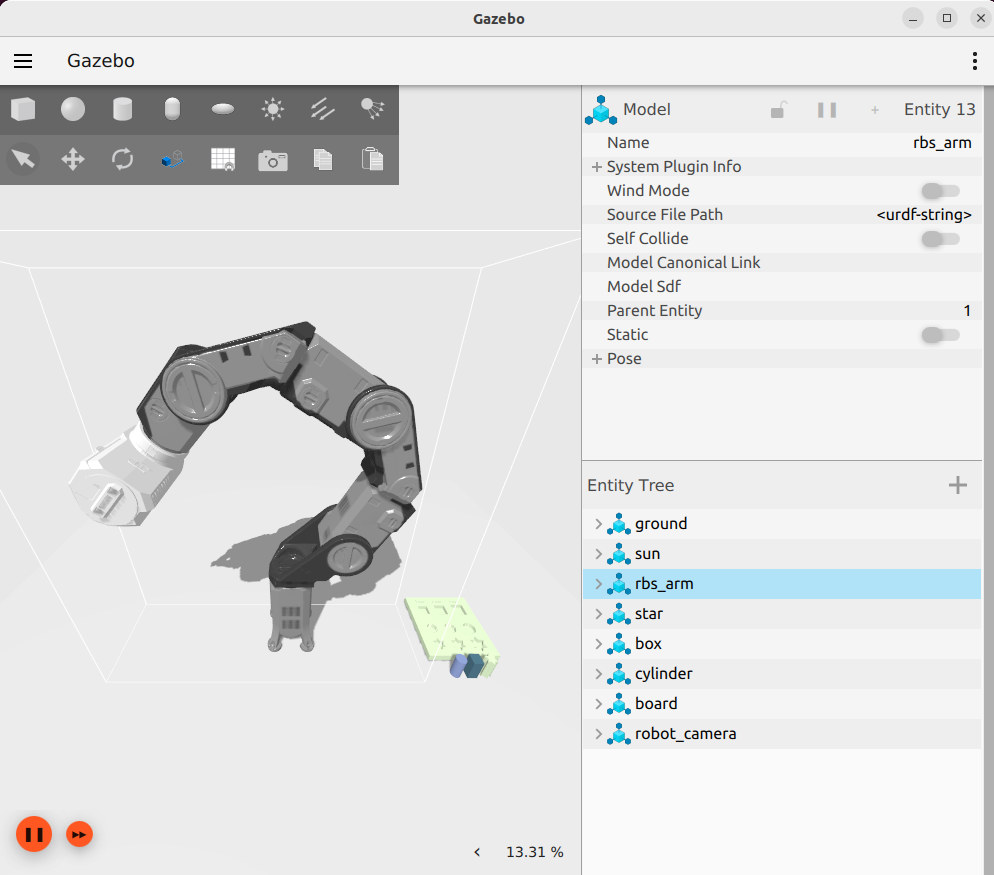 визуализация сцены с роботом
визуализация сцены с роботом
Пример запуска симуляции в режиме benchmark для оценки управления роботом через разные контроллеры
Запустить последовательно четыре терминала и выполнить запуск 3-х launch-файлов и симулятора Gazebo:
Во всех терминалах выполнить предварительную настройку:
# ROS2
source /opt/ros/humble/setup.bash
# Robossembler
cd ~/robossembler-ws
source install/setup.bash
- 1 - запуск интерфейсной ноды в режиме
benchmark
ros2 launch rbs_bt_executor interface.launch.py bt_path:=src/robossembler-ros2/test_examples/bt_benchmark mode:=benchmark
- 2 - запуск runtime с роботом в сцене
ros2 launch rbs_bringup rbs_bringup.launch.py
- 3 - запуск Gazebo (для визуализации процесса)
ign gazebo -g
- 4 - запуск дерева поведения
ros2 launch rbs_bt_executor rbs_bt_web.launch.py bt_path:=src/robossembler-ros2/test_examples/bt_benchmark
В терминале 1 (интерфейсная нода) будет отражаться время выполнения каждого действия:
 пример вывода журнала
пример вывода журнала
Пример запуска симуляции с записью rosbag-журнала для демонстрации в веб.
Запустить последовательно три терминала и выполнить запуск 3-х launch-файлов.
Во всех терминалах выполнить предварительную настройку:
# ROS2
source /opt/ros/humble/setup.bash
# Robossembler
cd ~/robossembler-ws
source install/setup.bash
- 1 - запуск интерфейсной ноды
ros2 launch rbs_bt_executor interface.launch.py bt_path:=src/robossembler-ros2/test_examples/bt_rosbag
- 2 - запуск runtime с роботом в сцене
ros2 launch rbs_bringup rbs_bringup.launch.py
- 3 - запуск дерева поведения
ros2 launch rbs_bt_executor rbs_bt_web.launch.py bt_path:=src/robossembler-ros2/test_examples/bt_rosbag
Для визуализации можно дополнительно запустить симулятор Gazebo (терминал 4):
ign gazebo -g
После выполнения дерева в папке ~/robossembler-ws/rbs_testbag сохранится журнал rosbag.