| brd | ||
| firmware | ||
| img | ||
| ros2_environment | ||
| src | ||
| tools | ||
| .gitignore | ||
| .gitlab-ci.yml | ||
| CHANGELOG.md | ||
| kicad_ci_test.kiplot.yaml | ||
| LICENSE | ||
| README.md | ||
Сервопривод Робосборщика

Бесщёточный сервопривод постоянного тока, адаптированный для автоматического производства. Разработан для управления 6-осевым роботом-манипулятором Robossembler Arm, но может использоваться и как самостоятельное изделие в составе других систем.
Ключевые особенности:
- Высокая мощность (допустимость редуктора)
- Высокая скорость (компенсация наличия редуктора)
- Хорошая динамика (разгон-торможение)
- Возможность электрического тормоза
Для управления используется универсальная плата-контроллер, которая может быть использована в вариантах исполнения двигателей разных диаметров (на данный момент 50 мм и 70 мм) со сходными характеристиками обмоток. Контроллер управляется через CAN-интерфейс.
Описание директорий
brd- KiCAD проект печатной платы контроллераfirmware- исходный код программы для микроконтроллера, инструкция по сборке и загрузке прошивки вfirmware/embed, тесты для проверки встроенного ПО вfirmware/testros2_environment- пакеты для управления мотором из ROS 2 с помощью ros2_controlsrc- 3D-модели вариантов исполнения мотора: 50 мм, 70 мм, металлическая версия двигателя (не интегрирована с контроллером), также присутствуют две модели редукторовtools- вспомогательное оборудование для тестирования, испытаний
Краткая инструкция по изготовлению
Статор
Для удобства изготовления статоров разработан станок для намотки катушек индуктивности. Исходные файлы для производства станка и инструкции размещены в репозитории gitlab.com/robossembler/cnc/motor-wire-winder.
Сборка
- Вставить 28 магнитов в ротор
- Установить подшипник в статор
- Установить проставку в статор между подшипником и платой
- Припаять плату к обмоткам (схема обмоток приведена ниже) и установить ее в статор
- Накрыть плату крышкой
- Установить фиксирующий шплинт
- Надеть на сборку статора ротор
- Подключить разъем программирования XP3 и прошить с помощью ST-Link-совместимого программатора
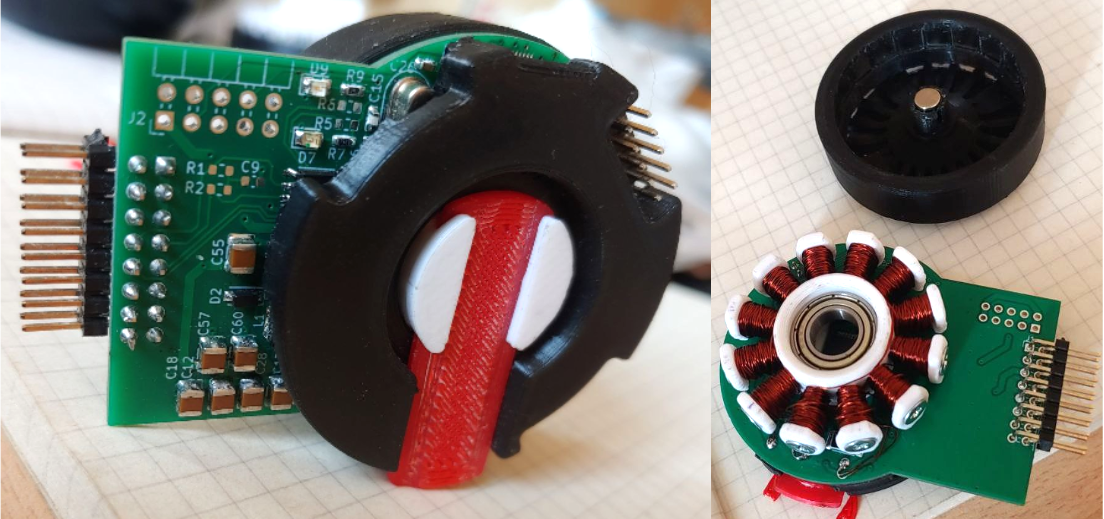
Фото прототипов
Первый прототип изготовленного печатного мотора диаметром 50мм.
Схемы намотки
Двигатель 70мм

Двигатель 50мм
